
erfinv#
ベクトル要素の要素ごとの逆誤差関数を計算します。
説明#
erfinv(a) 関数は、入力ベクトル a の要素の逆誤差関数の値を計算し、それを出力ベクトル y に書き込みます。
y = erf-1(a)、
ここで、erf(x) は次のように定義される誤差関数です:
有用な関係:
ここで erfc は相補誤差関数です。
説明:
は累積正規分布関数です。
ここで \(\phi -1(x)\) と erf-1(x) はそれぞれ \(\phi (x)\) と erf(x) の逆関数です。
次の図は、erfinv ファミリー関数 (erfinv、erfcinv、cdfnorminv) 間の関係を示しています。
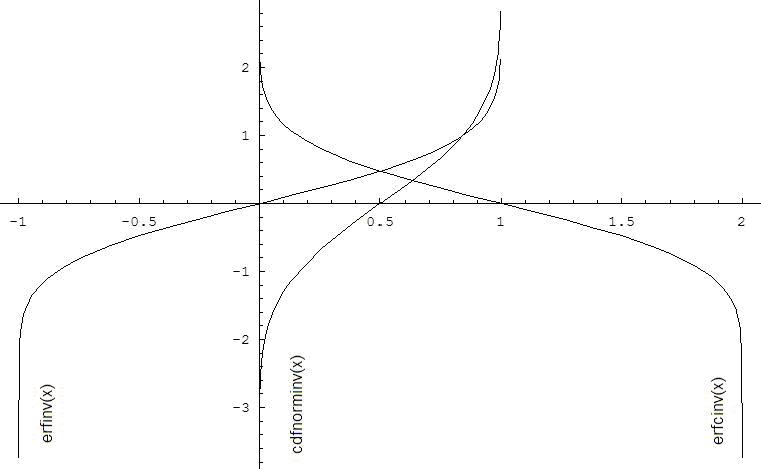
erfinv ファミリー関数の関係#
これらの関数の有用な関係:
引数 |
結果 |
エラーコード |
|---|---|---|
+0 |
+0 |
|
-0 |
-0 |
|
+1 |
+\(\infty\) |
|
-1 |
-\(\infty\) |
|
|a| > 1 |
QNAN |
|
+\(\infty\) |
QNAN |
|
-\(\infty\) |
QNAN |
|
QNAN |
QNAN |
|
SNAN |
QNAN |
API#
構文#
バッファー API
namespace oneapi::mkl::vm {
sycl::event erfinv(sycl::queue & exec_queue,
std::int64_t n,
sycl::buffer<T> & a,
sycl::buffer<T> & y,
oneapi::mkl::vm::mode mode = oneapi::mkl::vm::mode::not_defined,
oneapi::mkl::vm::error_handler<T> errhandler = {});
}namespace oneapi::mkl::vm {
sycl::event erfinv(sycl::queue & exec_queue,
sycl::buffer<T> & a,
oneapi::mkl::slice sa,
sycl::buffer<T> & y,
oneapi::mkl::slice sy,
oneapi::mkl::vm::mode mode = oneapi::mkl::vm::mode::not_defined,
oneapi::mkl::vm::error_handler<T> errhandler = {});
}USM API
namespace oneapi::mkl::vm {
sycl::event erfinv(sycl::queue & exec_queue,
std::int64_t n,
T const * a,
T * y,
std::vector<sycl::event> const & depends = {},
oneapi::mkl::vm::mode mode = oneapi::mkl::vm::mode::not_defined,
oneapi::mkl::vm::error_handler<T> errhandler = {});
}namespace oneapi::mkl::vm {
sycl::event erfinv(sycl::queue & exec_queue,
T const * a,
oneapi::mkl::slice sa,
T * y,
oneapi::mkl::slice sy,
std::vector<sycl::event> const & depends = {},
oneapi::mkl::vm::mode mode = oneapi::mkl::vm::mode::not_defined,
oneapi::mkl::vm::error_handler<T> errhandler = {});
}erfinv は次の精度とデバイスをサポートしています。
T |
デバイスサポート |
|---|---|
|
GPU |
|
CPU |
|
CPU および GPU |
|
CPU および GPU |
入力パラメーター#
バッファー API
- exec_queue
ルーチンが実行されるキュー。
- n
計算する要素の数を指定します。
- a
入力ベクトルを含むバッファー。
- sa
aのスライスセレクター。oneMKL スライスタイプの説明については、データタイプを参照してください。- sy
yのスライスセレクター。oneMKL スライスタイプの説明については、データタイプを参照してください。- mode
この関数呼び出しのグローバル VM モード設定をオーバーライドします。指定可能な値とその説明については、set_mode 関数を参照してください。これはオプションのパラメーターです。デフォルト値は
mode::not_definedです。- errhandler
この関数呼び出しのローカルエラー処理モードを設定します。引数と説明については、create_error_handler 関数を参照してください。これはオプションのパラメーターです。ローカル・エラー・ハンドラーはデフォルトで無効になっています。
USM API
- exec_queue
ルーチンが実行されるキュー。
- n
計算する要素の数を指定します。
- a
入力ベクトルへのポインター。
- sa
aのスライスセレクター。oneMKL スライスタイプの説明については、データタイプを参照してください。- sy
yのスライスセレクター。oneMKL スライスタイプの説明については、データタイプを参照してください。- depends
依存イベントのベクトル (入力データの準備ができるまで待機)。これはオプションのパラメーターです。デフォルトは空のベクトルです。
- mode
この関数呼び出しのグローバル VM モード設定をオーバーライドします。指定可能な値とその説明については、set_mode 関数を参照してください。これはオプションのパラメーターです。デフォルト値は
mode::not_definedです。- errhandler
この関数呼び出しのローカルエラー処理モードを設定します。引数と説明については、create_error_handler 関数を参照してください。これはオプションのパラメーターです。ローカル・エラー・ハンドラーはデフォルトで無効になっています。
出力パラメーター#
バッファー API
- y
出力ベクトルを含むバッファー。
- 戻り値 (event)
計算終了イベント。
USM API
- y
出力ベクトルへのポインター。
- 戻り値 (event)
計算終了イベント。
例#
erfinv の使用例は、oneMKL インストール・ディレクトリーの以下の場所にあります。
share/doc/mkl/examples/sycl/vml/source/verfinv.cpp